Macro Geneva Wheel: Difference between revisions
(Added Code) |
(Use {{MacroCode}}) |
||
| (17 intermediate revisions by 4 users not shown) | |||
| Line 1: | Line 1: | ||
<languages/> |
|||
| ⚫ | |||
<translate> |
|||
<!--T:1--> |
|||
{{Macro |
|||
|Name=Geneva Wheel |
|||
|Icon=GW_Dim.png |
|||
| ⚫ | |||
|Author=Drei |
|||
|Version=1.0 |
|||
|Date=2014-09-21 |
|||
|FCVersion=All |
|||
|Download=[https://www.freecadweb.org/wiki/images/8/8d/GW_Dim.png ToolBar Icon] |
|||
}} |
|||
==Description== <!--T:7--> |
|||
<syntaxhighlight> |
|||
Allows the user to create a Geneva wheel mechanism from scratch. Must edit values within the Macro to alter the size of the object. |
|||
| ⚫ | |||
<!--T:9--> |
|||
[[File:Geneva.png]] |
|||
==How To Use== <!--T:2--> |
|||
<!--T:3--> |
|||
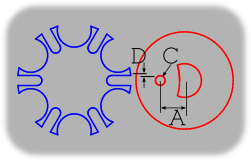
This Macro creates the main parts of a Geneva Wheel Mechanism. It depends on six values that must be altered in the code, read the comments in the code. The variables are: |
|||
<!--T:8--> |
|||
{|{{Prettytable}} |
|||
!Input |
|||
!Output |
|||
|-- |
|||
| |
|||
*a = Drive Crank Radius |
|||
*b = Geneva Wheel Radius |
|||
*n = Driven Slot Quantity |
|||
*p = Drive Pin Diameter |
|||
*t = Tolerance |
|||
*h = Height |
|||
| |
|||
*c = Distance Between Centers |
|||
*s = Slot Center Width |
|||
*w = Slot Width |
|||
*y = Stop Arc Radius |
|||
*z = Stop Disc Radius |
|||
*v = Clearance Arc |
|||
|} |
|||
==Link== <!--T:4--> |
|||
<!--T:5--> |
|||
[[Macro_Geneva_Wheel_GUI|Macro Geneva Wheel GUI]]: A GUI front end based on this macro that allows the user to create a Geneva wheel mechanism from scratch. |
|||
==Script== <!--T:6--> |
|||
</translate> |
|||
ToolBar Icon [[Image:GW_Dim.png]] |
|||
'''Macro_Geneva_Wheel.FCMacro''' |
|||
{{MacroCode|code= |
|||
| ⚫ | |||
#This Macro creates the main parts of a Geneva Wheel Mechanism |
#This Macro creates the main parts of a Geneva Wheel Mechanism |
||
| Line 104: | Line 160: | ||
Part.show(driveCrank) |
Part.show(driveCrank) |
||
Part.show(genevaWheel) |
Part.show(genevaWheel) |
||
}} |
|||
</syntaxhighlight> |
|||
{{clear}} |
|||
Latest revision as of 02:37, 8 May 2020
|
|
| Description |
|---|
| Allows the user to create a Geneva wheel mechanism from scratch. Must edit values within the Macro to alter the size of the object. Macro version: 1.0 Last modified: 2014-09-21 FreeCAD version: All Download: ToolBar Icon Author: Drei |
| Author |
| Drei |
| Download |
| ToolBar Icon |
| Links |
| Macros recipes How to install macros How to customize toolbars |
| Macro Version |
| 1.0 |
| Date last modified |
| 2014-09-21 |
| FreeCAD Version(s) |
| All |
| Default shortcut |
| None |
| See also |
| None |
{kind=link}
Description
Allows the user to create a Geneva wheel mechanism from scratch. Must edit values within the Macro to alter the size of the object.

How To Use
This Macro creates the main parts of a Geneva Wheel Mechanism. It depends on six values that must be altered in the code, read the comments in the code. The variables are:
| Input | Output |
|---|---|
|
|
Link
Macro Geneva Wheel GUI: A GUI front end based on this macro that allows the user to create a Geneva wheel mechanism from scratch.
Script
ToolBar Icon 
Macro_Geneva_Wheel.FCMacro
#Creation of a Geneva Wheel with Parametric values By: Isaac Ayala (drei)
#This Macro creates the main parts of a Geneva Wheel Mechanism
#It depends on six values that must be altered in the following code
#The variables are a, b, n, p, t and h.
#Definition for each variable
# Input
#a = Drive Crank Radius
#b = Geneva Wheel Radius
#n = Driven Slot Quantity
#p = Drive Pin Diameter
#t = Tolerance
#h = Height
# Output
#c = Distance Between Centers
#s = Slot Center Width
#w = Slot Width
#y = Stop Arc Radius
#z = Stop Disc Radius
#v = Clearance Arc
#Please note that you can alter the code so it depends on five values exclusively
#Just replace c, and either a or b with the following
# Keep value for a
#c = a/math.sin(math.pi/n)
#b = math.sqrt((math.pow(c,2))-(math.pow(a,2)))
# Keep value for b
#c = b/math.cos(math.pi/n)
#a = math.sqrt((math.pow(c,2))-(math.pow(b,2)))
from __future__ import division
import time
import math
from PySide import QtCore, QtGui
from FreeCAD import Base
import Part
#Inputs
a = 25.0
b = 60.0
n = 6
p = 4
t = 0.01
h = 5
T = 60
#Outputs
c = math.sqrt(pow(a,2) + pow(b,2))
s = a + b - c
w = p + t
y = a - (1.5 * p)
z = y - t
v = (b * z)/a
# Create the Drive Crank (Will be placed on the origin)
driveCrank = Part.makeCylinder(z, h)
driveCrank.translate(Base.Vector(0,0,0))
genevaWheelClearanceCut = Part.makeCylinder(b, h)
genevaWheelClearanceCut.translate(Base.Vector(-c,0,0))
driveCrank = driveCrank.cut(genevaWheelClearanceCut)
driveCrankBase = Part.makeCylinder((1.5*a), h)
driveCrankBase.translate(Base.Vector(0,0,-h))
driveCrank = driveCrank.fuse(driveCrankBase)
drivePin = Part.makeCylinder(p,h)
drivePin.translate(Base.Vector(-a,0,0))
driveCrank = driveCrank.fuse(drivePin)
# Create the Geneva Wheel (Will be placed on the x-axis on the left side)
genevaWheel = Part.makeCylinder(b,h)
genevaWheel.translate(Base.Vector(-c,0,0))
stopArc = Part.makeCylinder(y, h)
stopArc.translate(Base.Vector(((y-(b/2)),0,0)))
stopArc.rotate(Base.Vector(-c,0,0),Base.Vector(0,0,1),30)
for i in range(6):
stopArc.rotate(Base.Vector(-c,0,0),Base.Vector(0,0,1),60)
genevaWheel = genevaWheel.cut(stopArc)
slotLength = Part.makeBox(s,(2*w),h)
slotLength.translate(Base.Vector(-a,-w,0))
slotRadius = Part.makeCylinder(w,h)
slotRadius.translate(Base.Vector(-a,0,0))
slot=slotLength.fuse(slotRadius)
for i in range(6):
slot.rotate(Base.Vector(-c,0,0),Base.Vector(0,0,1),60)
genevaWheel = genevaWheel.cut(slot)
# Display Result
Part.show(driveCrank)
Part.show(genevaWheel)